第2章-知识点4 典型环节及其传递函数
教学目的:使学生掌握典型环节的概念;熟悉常用元部件的传递函数,明确系统常用的传递函数形式。
基本环节:基本方式和动态性能相同的环节。任何复杂的控制系统都是由最基本的典型环节所组成的。
1、控制系统典型环节
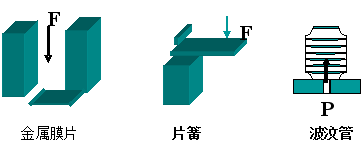
(1)比例环节: 输出随输入成比例变化
![]() 其传递函数为:
其传递函数为:
①弹性元件:位移随外力大小成比例变化,比例系数取决于元件的弹性大小,与输入输出无关。
![]()
位移在弹性范围内遵循虎克定律:![]()
传递函数为:![]()
②节流元件:前后压力差的大小随气流量成比例变化,比例系数取决于元件的气阻大小,与输入输出无关。
![]()
传递函数为![]() :
:![]()
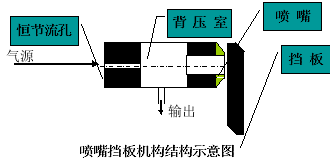
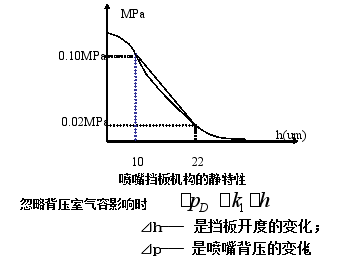
③喷嘴挡板机构:输出压力随喷嘴挡板的开度成比例变化

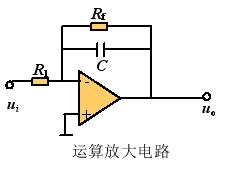
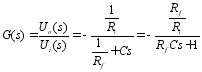
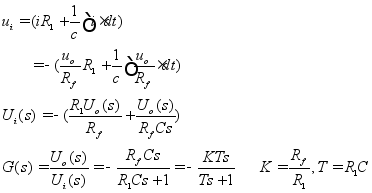
④运算放大器
(2)积分环节: 输出与输入对时间的积分成比例。
微分方程:![]()
传递函数:![]()
 例1.R-C积分电路
例1.R-C积分电路

例2.气容
![]()
Δm--是空气储存量的增量;△p--是气压室压力增量.
气体质量流量 ![]()
因:![]()
气容传递函数:![]()
(3)一阶惯性环节(非周期环节)
输入突变时,输出的变化滞后于输入的变化,并按一定的规律趋近于输入值。
 微分方程式为:
微分方程式为:![]()
传递函数:![]()
例1.RC电路
![]()
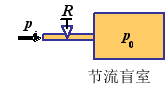
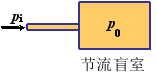
例2.节流盲室组成的一阶惯性环节
微分方程:![]()
 传递函数:
传递函数:![]()
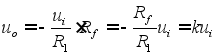
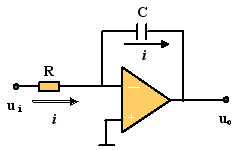
例3.运算放大器
![]()
![]()
(4)一阶微分环节:输出与输入的微分成比例。
微分方程:![]()
![]()
传递函数:![]()
 因此,理想的微分环节在实际中并不存在。
因此,理想的微分环节在实际中并不存在。
![]() 实际的微分环节:理想的微分环节与惯性环节的串联。
实际的微分环节:理想的微分环节与惯性环节的串联。

一阶微分:![]()
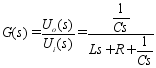
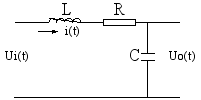 (5)振荡环节(含有两种形式的储能元件)
(5)振荡环节(含有两种形式的储能元件)
微分方程:
传递函数为: ![]()
例1:RLC电网络
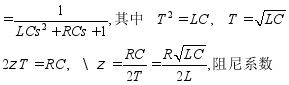
 例2.质量-弹簧-阻尼器系统
例2.质量-弹簧-阻尼器系统![]()
![]()
![]()
(6)恒时延环节
输入xi(t)与输出xo(t)之间有:![]()
其传递函数:![]()
1)、测量元件离被控对象有一段距离;
2)、物料传输过程中,因距离远而产生时延。
2.对传递函数的几点说明
①、传递函数只适用于线性系统,而不适用于非线性系统。因为传递函数是在拉氏变换的基础上导出的,而拉氏变换是一种线性积分变换,只适用于线性微分方程,非线性系统不能用线性微分方程来描述,也就不能用传递函数表示。
②、传递函数中的各项系数与微分方程中的各项系数对应相等,完全由系统的内部结构、参数决定,而与输入量的大小和形式无关,故传递函数与微分方程一样,均可作为系统的动态数学模型。
③、传递函数的结构形式及参数虽然相同,但输入、输出的物理量不同,则代表的物理意义不同。从另一方面说,两个完全不同的系统(例如一个是机械系统,一个是电子系统),只要它们的控制性能一样,就可以有完全相同的传递函数。这就是在实验室做模拟实验的理论基础。
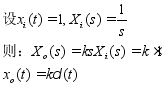
④、G(s)的拉氏逆变换是系统的脉冲响应:
![]()
⑤、传递函数只表明线性系统的零状态响应特性,它是由系统工作状态相对静止时得出的。这时可认为,对于相对给定的平衡点,系统输出量和输入量的初始值均为零,这才符合传递函数的定义。
⑥、传递函数分子多项式的阶次总是低于至多等于分母多项式的阶次,即 m≤n 。这是因为实际物理系统或元件中总是含有较多的惯性元件,以及能源又是有限的缘故。传递函数分母中S 的最高阶次等于输出量导数的最高阶次。如果s 的最高阶次为n ,则系统称为n 阶系统。
⑦、传递函数的三种常用表示形式:
